Autonomous cars aren't a new thing in the industry. A research project which initiated from the Defense Advanced Research Projects Agency (DARPA) a few years back has turned into a worldwide search for the first car that can drive on its own, with no driver aboard.
Many tried to make such cars work, few succeeded. But only one group actually did it. They're called VisLab (Artificial Vision and Intelligent Systems Laboratory, a spin-off company of the University of Parma), a bunch of engineers, scientists and students which set out back in July to complete an audacious 8,000 miles (12,874 km) journey from Italy to China. This October, they completed their mission.
Below is a short sum-up of the technologies used in this endeavor, one which they entitled VisLab Intercontinental Autonomous Challenge (VIAC). A “how” more than a “why” of the historic trip which concluded on the premises of the Shanghai World Expo 2010.
THE CONCEPT
How about taking a driverless van, powered by the greenest technologies available, on a ground-breaking trip across the world, just to show it can be done? No strings attached, no hidden agenda, just testing. Can it, but most importantly, will it be made to work?
These were the basic ideas which governed the men, women and companies which backed the project. In the years which preceded the 2010 trip, the project managed to get onboard several companies from more than one of the world's industries. From the high-definition cameras supplied by Kappa, to the commercial vehicles themselves, supplied by Piaggio and to the European Research Council, which came up with the money, all fell into place by July this year, when the entire adventure started.
The cars, green as they were thanks to the use of electric power, were drawing their energy from solar panels mounted on the top of their roofs. The power generated by the solar panels was enough to feed all the driving systems, lasers, sensors, data transmission and so on.



In case the solar panels weren't enough, the vehicles were also fitted with a separate power plug for conventional recharging. The systems of the vehicle, other than the ones used for the actual driving, could be charged with the help of a system plug located at the rear.
There were in all two autonomous vehicles traveling in tandem, acting on a leader-follower basis. Both cars were identical in design and features, but each of them was designed with a different goal.
The first vehicle might be considered some type of a semi-autonomous car. Although no actual human was sitting inside the car, the leader-car had to get some human-generated input, like the routes to follow.
The second vehicle was completely human-free. It's only mission was to follow the leader vehicle, in one of two ways: when the car in front was in visual range, the follower used sensors to mimic the behavior, direction and speed of the leader. When the first vehicle was for some reason out of visual range, the follower acted on GPS coordinates sent by the car in front.
 Although complicated, the technologies used to make the two cars drive their own path are part of our daily lives. An entire array of sensors, cameras, lasers and other systems were used to help the cars navigate, refine their position on the road, avoid obstacles and determine the speed of travel.
Although complicated, the technologies used to make the two cars drive their own path are part of our daily lives. An entire array of sensors, cameras, lasers and other systems were used to help the cars navigate, refine their position on the road, avoid obstacles and determine the speed of travel.
In the front, the sight of each vehicle was insured by two color cameras, located at the top corners of the Porter. They were used to locate obstacles and lane markings and determine slope. In between them, a laser scanner was used for off-road driving to detect any irregularities in the terrain. On the front bumper, three lasers were used for detection as well. Located at each corner of the car and in the center, the lasers detected every single obstacle in front of the vehicle.
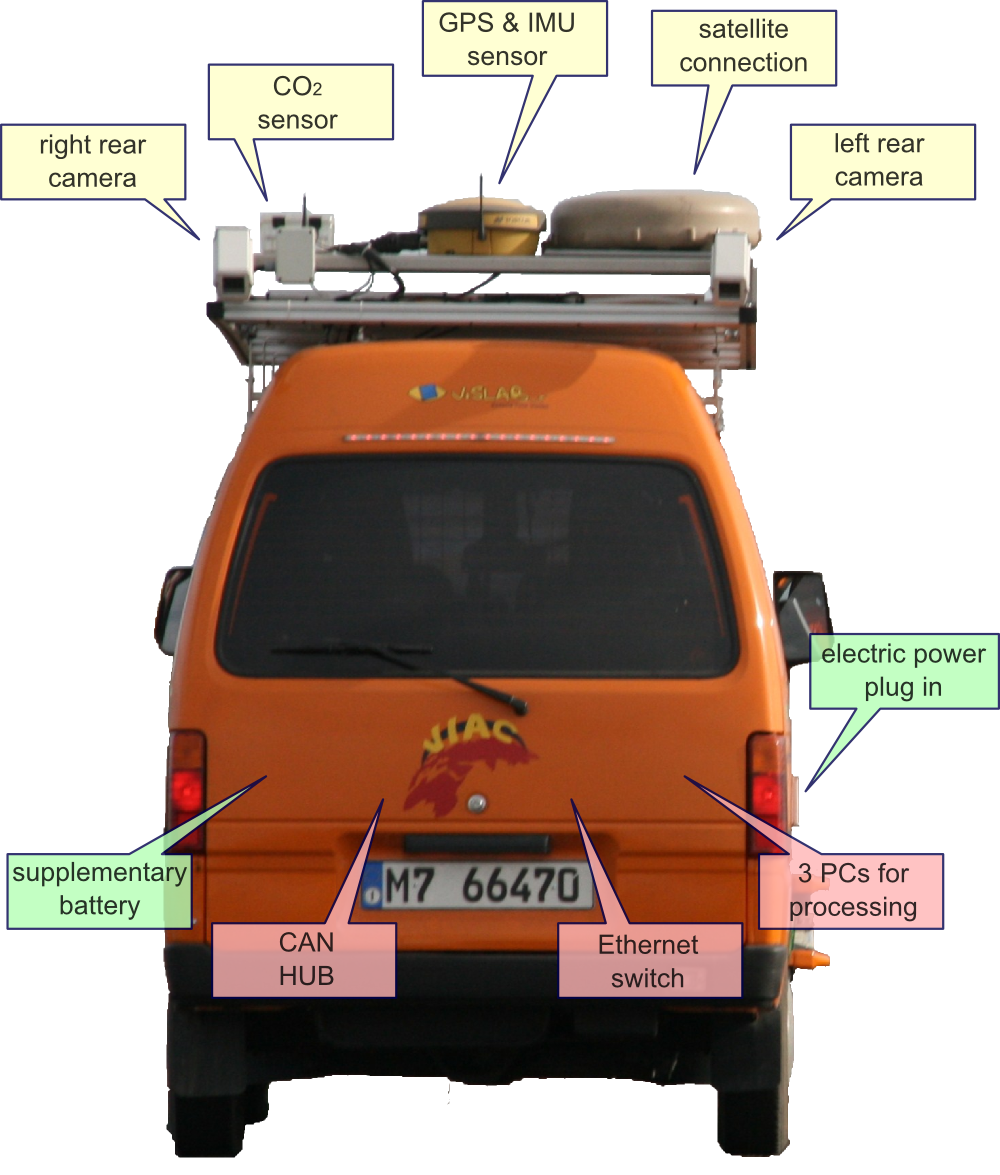 The front vision and detection systems of the car were completed by a panoramic vision system located behind the windshield, which combined the three different images coming from the cameras to create a 180 degree view of the terrain in front. At the back, another pair of cameras, located at each corner, were used to get a view of the terrain behind. The GPS system was mounted on top of the car.
The front vision and detection systems of the car were completed by a panoramic vision system located behind the windshield, which combined the three different images coming from the cameras to create a 180 degree view of the terrain in front. At the back, another pair of cameras, located at each corner, were used to get a view of the terrain behind. The GPS system was mounted on top of the car.
All of the above technologies were brought together with one goal: test them, but also test other autonomous systems. The 8,000 miles trip was the perfect medium to test and adjust stop-and-go, waypoint following, detection of vehicles, lanes, obstacles and pedestrians, panoramic viewing system, terrain mapping and slope estimation.
It will probably take a considerable amount of time to compile all the data gathered in the three-months long journey from west to east. When all the pieces will be made to fit though, we'll have a better understanding of the requirements and advantages (or disadvantages) of using autonomous cars.
These were the basic ideas which governed the men, women and companies which backed the project. In the years which preceded the 2010 trip, the project managed to get onboard several companies from more than one of the world's industries. From the high-definition cameras supplied by Kappa, to the commercial vehicles themselves, supplied by Piaggio and to the European Research Council, which came up with the money, all fell into place by July this year, when the entire adventure started.
THE CARS
To be able to complete their historic journey, the team took from Piaggio no less than 4 cars, with the ones to do the actual driverless... driving being Porter models equipped with electric drive trains. Although the electric motors' performances are not that important to our presentation, the way in which they recharge the batteries is.The cars, green as they were thanks to the use of electric power, were drawing their energy from solar panels mounted on the top of their roofs. The power generated by the solar panels was enough to feed all the driving systems, lasers, sensors, data transmission and so on.
In case the solar panels weren't enough, the vehicles were also fitted with a separate power plug for conventional recharging. The systems of the vehicle, other than the ones used for the actual driving, could be charged with the help of a system plug located at the rear.
There were in all two autonomous vehicles traveling in tandem, acting on a leader-follower basis. Both cars were identical in design and features, but each of them was designed with a different goal.
The first vehicle might be considered some type of a semi-autonomous car. Although no actual human was sitting inside the car, the leader-car had to get some human-generated input, like the routes to follow.
The second vehicle was completely human-free. It's only mission was to follow the leader vehicle, in one of two ways: when the car in front was in visual range, the follower used sensors to mimic the behavior, direction and speed of the leader. When the first vehicle was for some reason out of visual range, the follower acted on GPS coordinates sent by the car in front.
TECHNOLOGY
In the front, the sight of each vehicle was insured by two color cameras, located at the top corners of the Porter. They were used to locate obstacles and lane markings and determine slope. In between them, a laser scanner was used for off-road driving to detect any irregularities in the terrain. On the front bumper, three lasers were used for detection as well. Located at each corner of the car and in the center, the lasers detected every single obstacle in front of the vehicle.
All of the above technologies were brought together with one goal: test them, but also test other autonomous systems. The 8,000 miles trip was the perfect medium to test and adjust stop-and-go, waypoint following, detection of vehicles, lanes, obstacles and pedestrians, panoramic viewing system, terrain mapping and slope estimation.
CONCLUSION
As we already told you, the trip concluded with a success. Nothing bad happened with the cars along the way, despite the fact they had to travel, pretty much on their own (but accompanied by VisLab personnel in separate vehicles), through places like Siberia and the Gobi desert.It will probably take a considerable amount of time to compile all the data gathered in the three-months long journey from west to east. When all the pieces will be made to fit though, we'll have a better understanding of the requirements and advantages (or disadvantages) of using autonomous cars.
